上海硕博教学设备有限公司_弘扬工匠精神_促进我国教育事业发展,培养大国工匠,专业研发设计,教学仪器、教学设备、教学模型、教学仪器设备可分为实验和实训两大类主要应用于理工类各专业,如:电子信息工程、机电一体化、计算机原理等等,教学实训设备,教学实验设备,高职实训设备、中职实训设备,技师培训设备,企业培训机构实训设备,助力高校实现产业人才培养,掌握工程的基本技术技能,让学生更好的学习专业知识,加强了学生对理论知识的理解,能使学生把理论与实践结合,满足学生就业的需要,为学生走上工作岗位打好基础,培养实用性高技能技术人才!电气自动化实训设备、电气动力设备安装调试实训装置、电气装配实训装置、光机电一体化实训设备、机电一体化实训装置、自动化生产线实训设备、工业机器人应用实训装置、工业自动化实训装置、自动化生产线实训装置、数控机床装调与维修、数控车床铣床实训设备、数控机床电气维修实训考核装置、传感器实训设备、PLC可编程实训装置、PLC可编程控制器教学设备、计算机原理实训设备、计算机组成原理实验系统、自控计控原理实验系统、通信原理实验箱、光通信实验系统、单片机实训设备、单片机应用实训装置、单片机实验箱、微机接口综合实验箱、变频调速实验装置、网孔板电工电子实训设备、高级技师电工实训设备、维修电工考核实训装置、维修电工技能实训装置、工厂电气控制实训设备、电工电子实验设备、电子实训设备、电工基础实训装置、电工电子实训平台、模电数电实训设备、数电模电实验箱、模拟电路实验箱、电路分析实验箱、数字电子技术实验箱、模拟电子技术实验箱、高性能电工电子实验设备、电工电拖实训设备、电工技能实训考核装置、电拖实训设备、心肺复苏模拟人、电子工艺实训考核装置、机电电拖运动实训装置、机床电气实训装置、电机装配维修实训装置、电力电子技术实训装置、电力电子技术实验装置、楼宇自动化实训装置、供配电技术实训装置、用电安全实训设备、建筑供 电实训装置、物联家居实训设备、物联网实训装置、综合布线实训装置、机床电气技能实训考核装置、金工实训设备、钳工技能实训装置、钳工实训平台、电机实训设备、机械陈列柜、电机模型、透明注塑机模型、 测绘模型、机械传动实训设备、机械原理实训设备,机械基础实训设备,机械设计实训装置、机械创新实训设备、 制图桌、工程机械实验设备、煤矿技能实训设备、船舶教学设备、液压与气动实训装置、液压与气压传动实训装置、气动PLC控制实训设备、液压传动实验台、液压元件拆装实训台、电机装配与维修检测实训装置、建筑智能楼宇实训装置、智能化工程系统实训装置、排水设备安装与控制实训装置、消防系统实训装置、消防安保培训装置、电梯实训装置、电梯安装与维修保养、家用实训设备、多功能家用电子产品教学设备、家用技能实训考核装置、采暖通风实训设备、制冷制热 教学仪器、制冷制热技术实训考核装置、中央空调实训考核装置、部队实训设备、汽车教学设备、汽车发动机实训台、汽车发动机拆装台、汽车底盘实训设备、汽车电器实验台、汽车示教板、汽车解剖模型、汽车空调实训设备、汽车电路接线实训设备、汽车整车实训设备、新能源汽车实训设备、汽车电子实验箱、汽车运用与维修、轨道交通实训设备、新能源实训装置、风光互补发电实训系统、太阳能光伏发电系统、风能发电实训设备、太阳能发电实训装置、太阳能教学实验箱、过程控制实训设备、热工 实验设备、流体力学实训设备、化工工程实训设备、化工原理实训设备、环境工程实训装置、智能化实训装置等教学设备。上海硕博有完整的售后服务系统,会有专业的工作人员上门为您处理问题,服务贴心周到,选择我们一定不会让您失望,以满足各类大中专院校实训实验需求。公司生产的教学实训设备款弍新颖、质量上乘、科技含量高,产品销售网络遍及全囯。
 机械基础实训设备
机械基础实训设备 电子工艺实训考核装置
电子工艺实训考核装置 工业数字化网络综合实训平台
工业数字化网络综合实训平台 自动生产线实训考核装置
自动生产线实训考核装置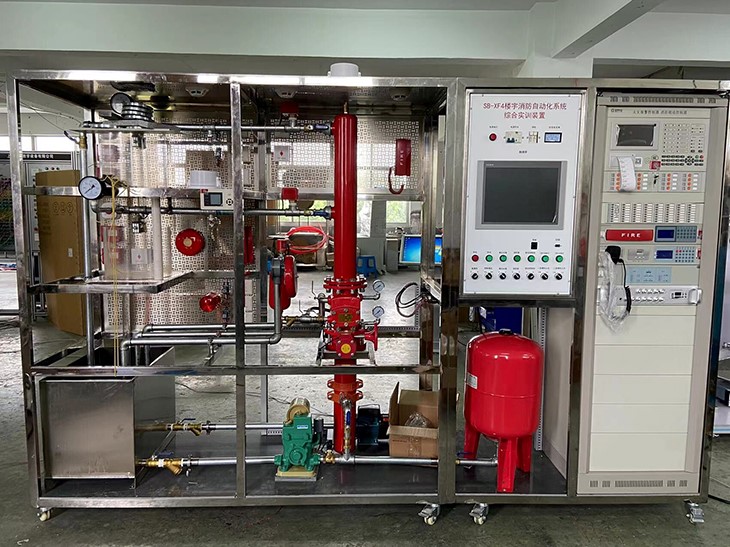 楼宇消防自动化实训装置
楼宇消防自动化实训装置 电工电子电拖实验室设备
电工电子电拖实验室设备 光机电一体化实训考核装置
光机电一体化实训考核装置 变频调速技术实训装置
变频调速技术实训装置 维修电工实训考核装置
维修电工实训考核装置 液压与气动综合实训室设备
液压与气动综合实训室设备 PLC可编程控制综合实训装置
PLC可编程控制综合实训装置 电力电子技术实训装置
电力电子技术实训装置 电机与变压器实验实训设备
电机与变压器实验实训设备 汽车教学设备
汽车教学设备 传感器检测技术实验台
传感器检测技术实验台 电梯实验实训设备
电梯实验实训设备 透明液压plc控制实验台
透明液压plc控制实验台 单片机技术实训室设备
单片机技术实训室设备 机电一体化综合实训装置
机电一体化综合实训装置 工厂供电技术实训装置
工厂供电技术实训装置 智能楼宇实训室设备
智能楼宇实训室设备 计算机组装与维护实训设备
计算机组装与维护实训设备 电气装配实训设备
电气装配实训设备 创新工作室实训装置
创新工作室实训装置 机床电气实训室设备
机床电气实训室设备 高性能电工电子电拖实训装置
高性能电工电子电拖实训装置 制冷与空调技能实训设备
制冷与空调技能实训设备 电气安装与维修实训考核装置
电气安装与维修实训考核装置 电工技术实验台
电工技术实验台 新能源教学实验实训设备
新能源教学实验实训设备 新能源汽车教学设备
新能源汽车教学设备 热工实训实验装置
热工实训实验装置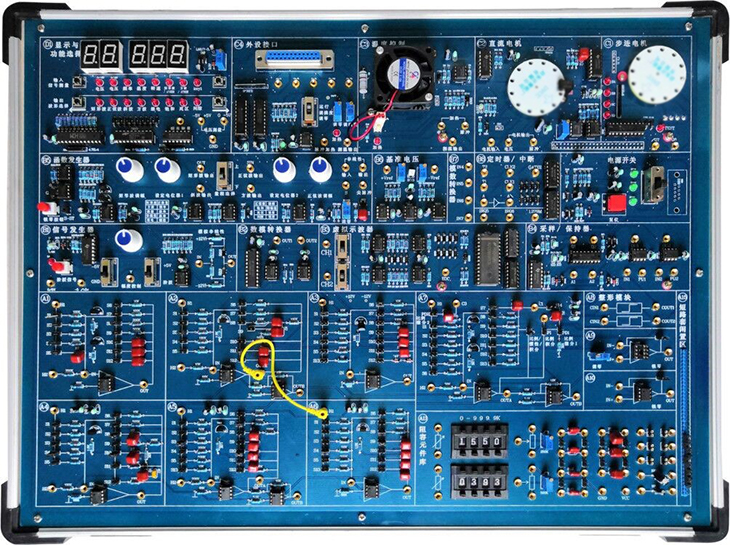 自控原理实验箱
自控原理实验箱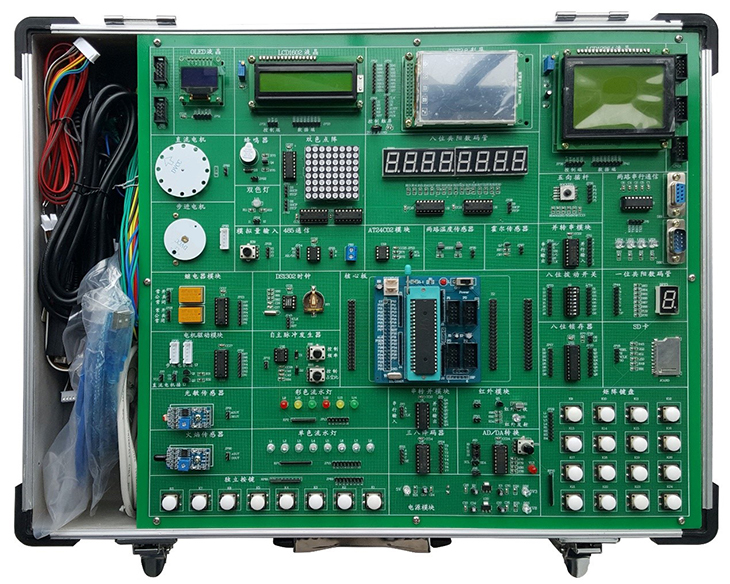 STM32单片机实验箱
STM32单片机实验箱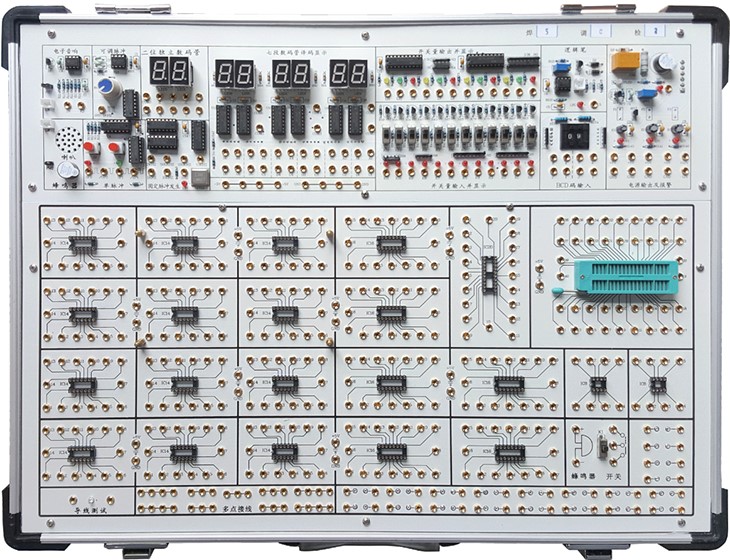 数模电实验室设备
数模电实验室设备 驱动综合实训室设备
驱动综合实训室设备 PLC变频器控制技术实训装置
PLC变频器控制技术实训装置 机电专业技术应用实训设备
机电专业技术应用实训设备 电工技术综合实训装置
电工技术综合实训装置 电子焊接装配实训台
电子焊接装配实训台 模电数电技术实验台
模电数电技术实验台 电机及拖动技术实训装置
电机及拖动技术实训装置 电子技术综合实验装置
电子技术综合实验装置 电气控制实训平台
电气控制实训平台



